Paul Templier

PhD, Engineer, Nerd.
Postdoc @ ICL.
Hi there, I’m a French researcher and engineer working on adaptive control of robots and autonomous systems. Welcome to my personal web page!
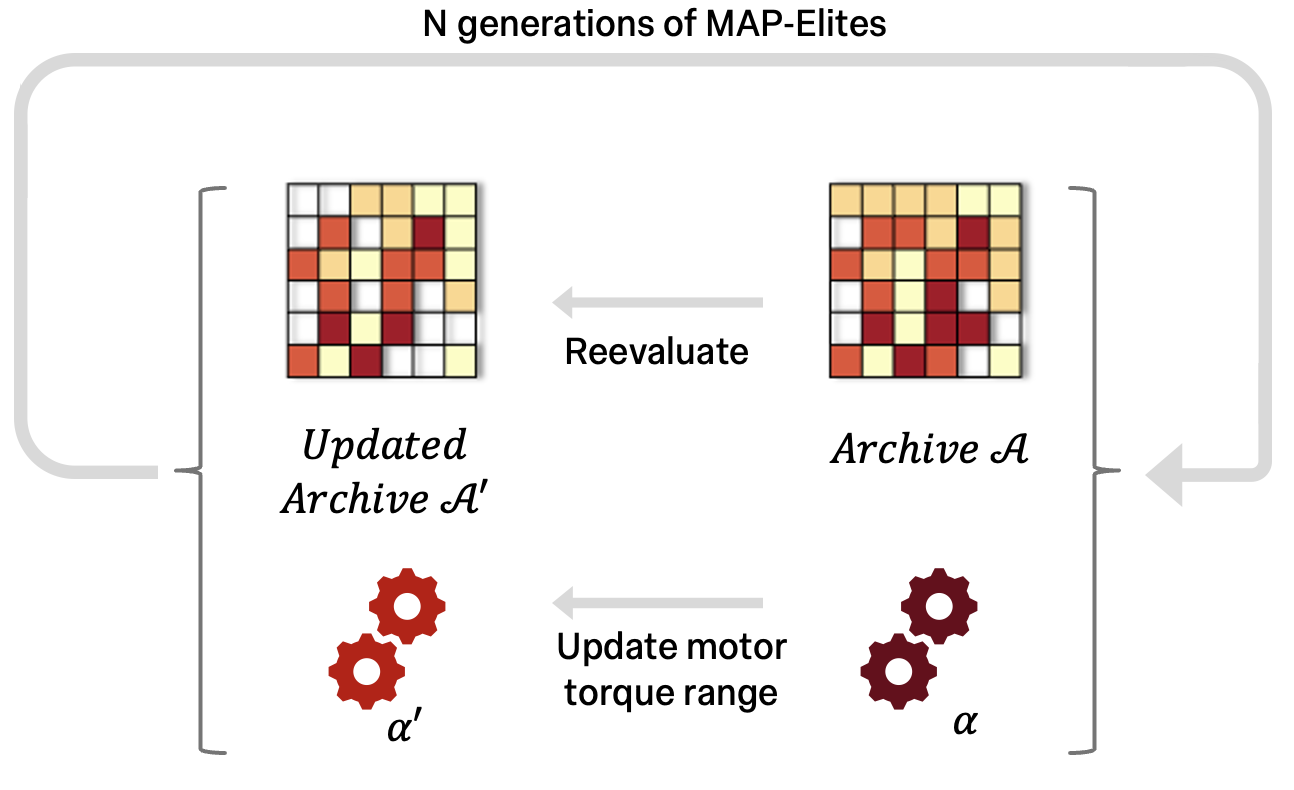
My research is dedicated to understanding how intelligence emerges in complex systems. Currently a Postdoc at Imperial College London in Prof. Antoine Cully’s lab, I obtained my PhD studying the search for intelligent agents by mixing Evolution, Reinforcement Learning, and Quality-Diversity.
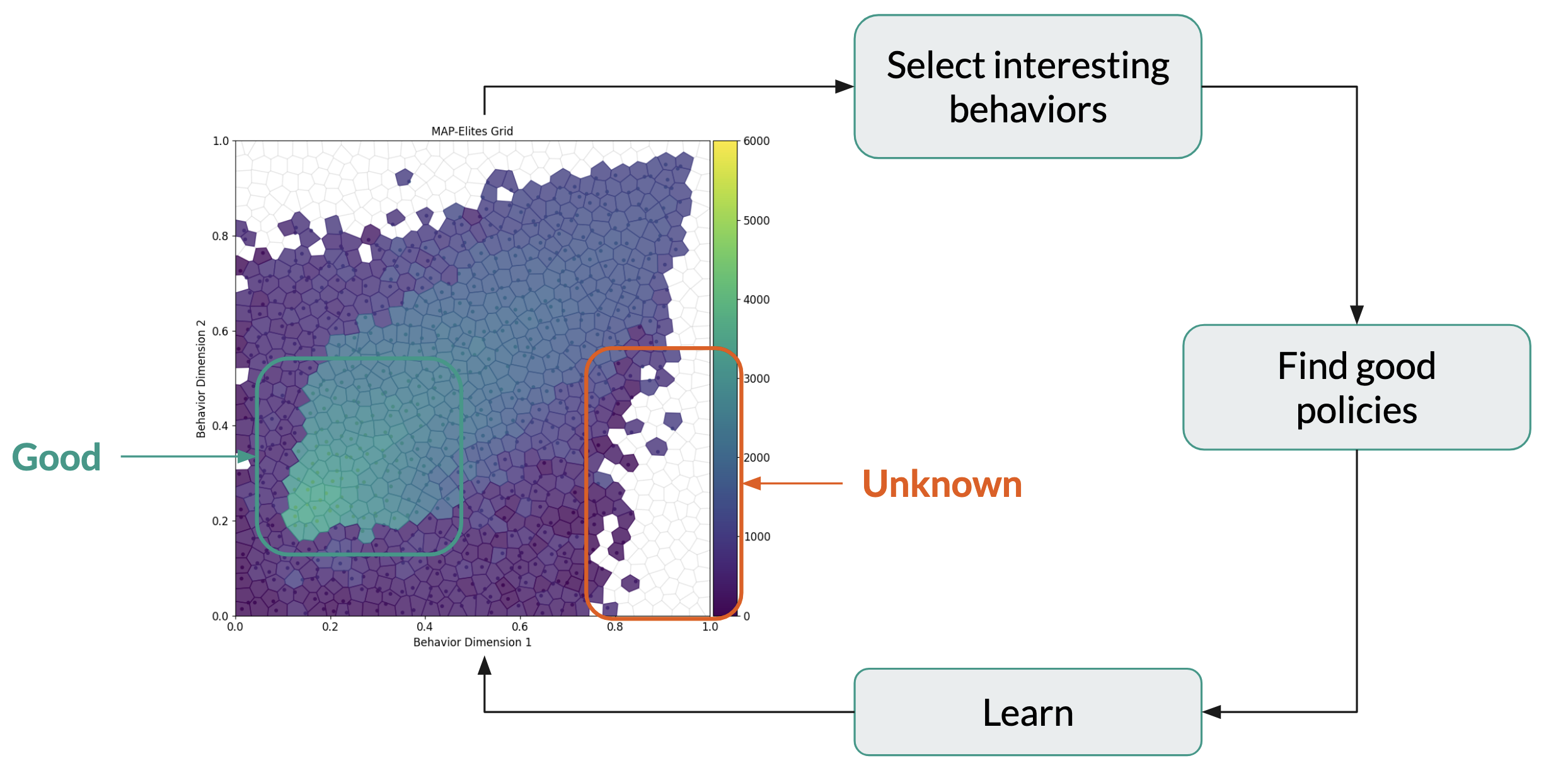
My work ranges from theoretical contributions in evolutionary methods to practical applications in adaptive robotics, motivated by a single question: how can we design learning processes that allow artificial agents to discover diverse, high-performing skills on their own?
This work is supported by 14 years of programming experience in various languages, from C to Python, with a strong focus on Jax in the last 3 years. This includes being a core contributor to QDax and Kheperax, which support fast and scalable experimentation for Quality-Diversity methods.
I also love cooking, so you can find some of my personal recipes in the Cooking section. Feel free to try them out and let me know if you like them!
News
| Jan 02, 2026 | New year, new website! |
|---|---|
| Aug 15, 2024 | Postdoc at Imperial College London |
| Apr 24, 2024 | Received my PhD from ISAE-SUPAERO! |
| Apr 04, 2022 | My PhD in 180s: regional finalist |